Kerala IoT Challenge
Foxlab Makerspace in association with GTech - Group of Technology Companies in Kerala is launching our prestigious program “Kerala IoT Challenge 2021”, with a vision to mould 100 IoT experts in Kerala, hosting on the µLearn platform. Kerala IoT Challenge is a program designed in 4 levels followed by a hackathon to identify and train quality industry leaders in the IoT domain, while any novice learner can start with layer 1 and others can enter laterally to the desired layer after an evaluation.
About Me
Hi, I am MOHAMED NIHAJ K. I am a Final year Computer engineering student @ SSM POLYTECHNIC COLLEGE TIRUR I Love to learn new things and I like to be updated with development in the Tech Industry. I am Fascinated about Tech related stuff.
Experiment-1 Hello world Led blinking
Code
void setup()
{
pinMode(8, OUTPUT);
}
void loop() {
digitalWrite(8, HIGH);
delay(1000);
digitalWrite(8, LOW);
delay(1000);
}
Experiment-2 Traffic Light
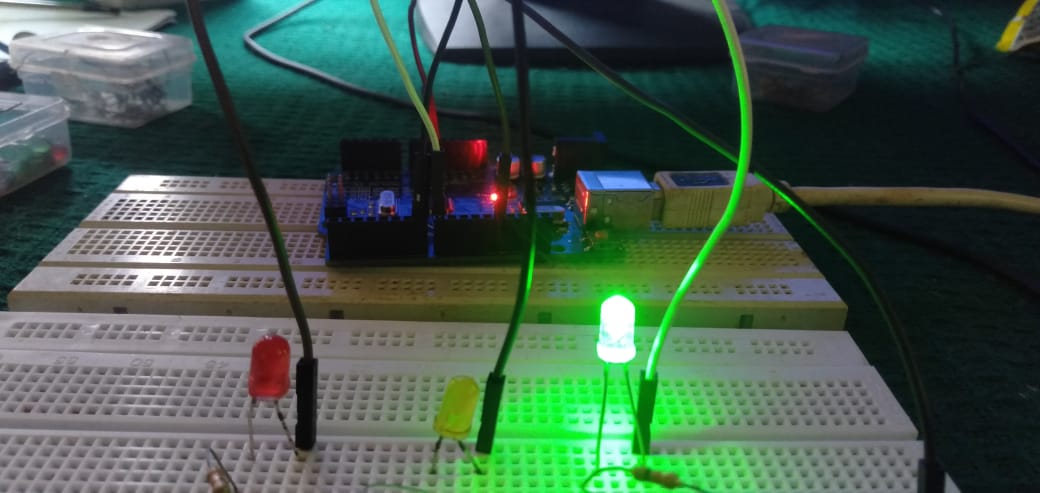
Code
void setup()
{
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
pinMode(8, OUTPUT);
}
void loop()
{
digitalWrite(13, HIGH);
delay(5000);
digitalWrite(13, LOW);
for(int i=0; i<3; i++)
{
delay(500);
digitalWrite(12, HIGH);
delay(500);
digitalWrite(12, LOW);
}
delay(500);
digitalWrite(8, HIGH);
delay(5000);
digitalWrite(8, LOW);
}
Experiment-3 LED Chasing Effect
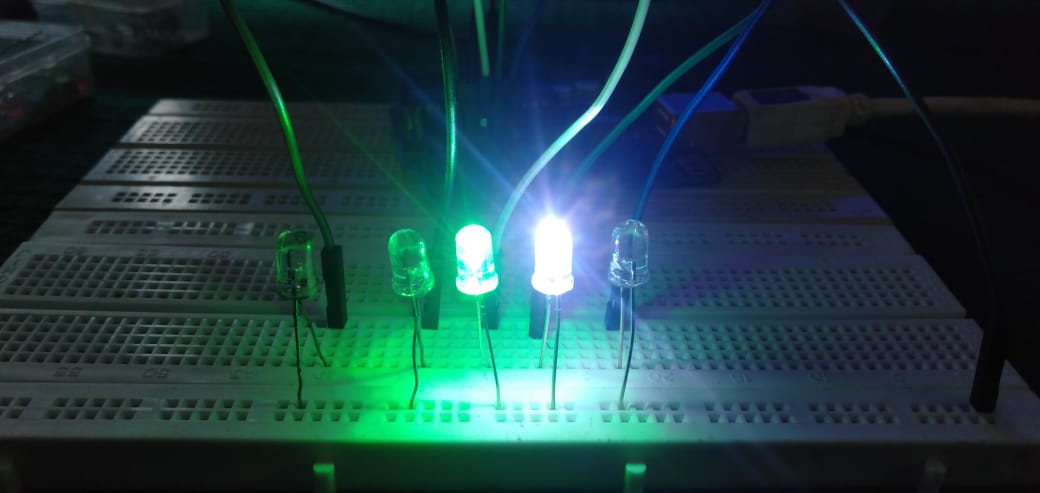
Code
int BASE = 2 ;
int NUM = 6;
void setup()
{
for (int i = BASE; i < BASE + NUM; i ++)
{
pinMode(i, OUTPUT);
}
}
void loop()
{
for (int i = BASE; i < BASE + NUM; i ++)
{
digitalWrite(i, LOW);
delay(200);
}
for (int i = BASE; i < BASE + NUM; i ++)
{
digitalWrite(i, HIGH);
delay(200);
}
}
Experiment-4 Button Controlled LED
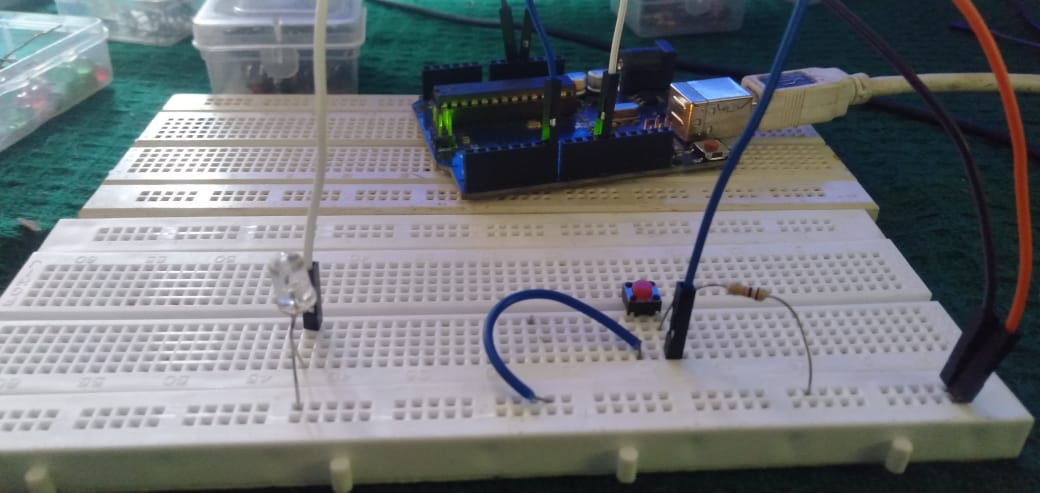
Code
int x;
void setup()
{
pinMode(11, OUTPUT);
pinMode(7, INPUT);
}
void loop()
{
val=digitalRead(7);
if(x == LOW)
{
digitalWrite(11, LOW);
}
else
{
digitalWrite(11, HIGH);
}
}
Experiment-5 Buzzer
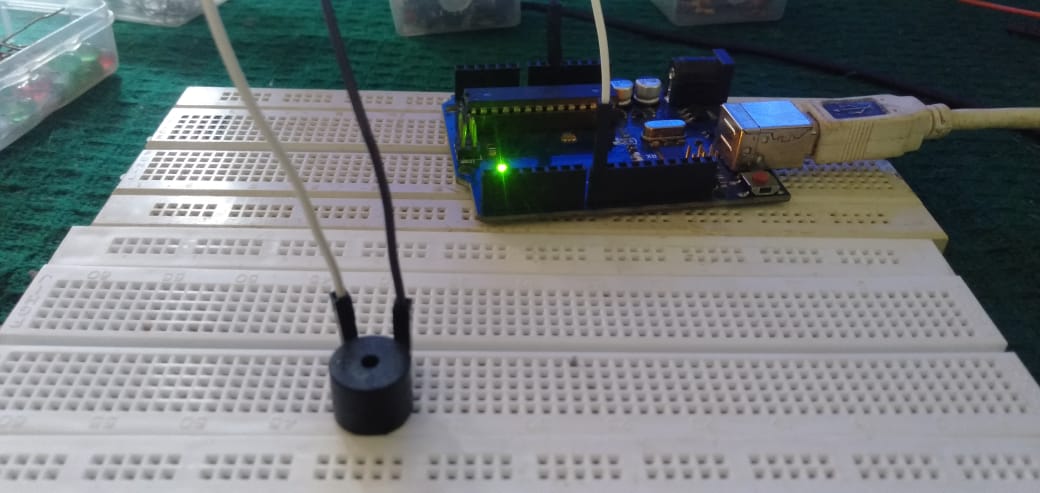
Code
int x = 8;
void setup()
{
pinMode(x,OUTPUT);
}
void loop()
{
digitalWrite(x, HIGH);
}
Experiment-6 RGB LED
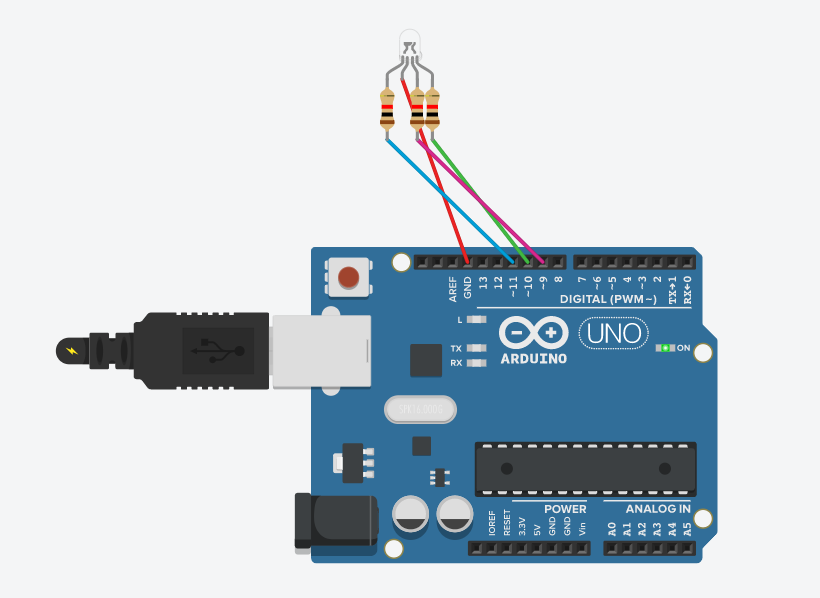
Code
int red = 11;
int blue =10;
int green =9;
int x;
void setup() {
pinMode(red, OUTPUT);
pinMode(blue, OUTPUT);
pinMode(green, OUTPUT);
Serial.begin(9600);
}
void loop()
{
for(x=255; x>0; x--)
{
analogWrite(11, x);
analogWrite(10, 255-x);
analogWrite(9, 128-x);
delay(10);
}
for(x=0; x<255; x++)
{
analogWrite(11, x);
analogWrite(10, 255-x);
analogWrite(9, 128-x);
delay(10);
}
Serial.println(x, DEC);
}
Experiment-7 LDR Light Sensor
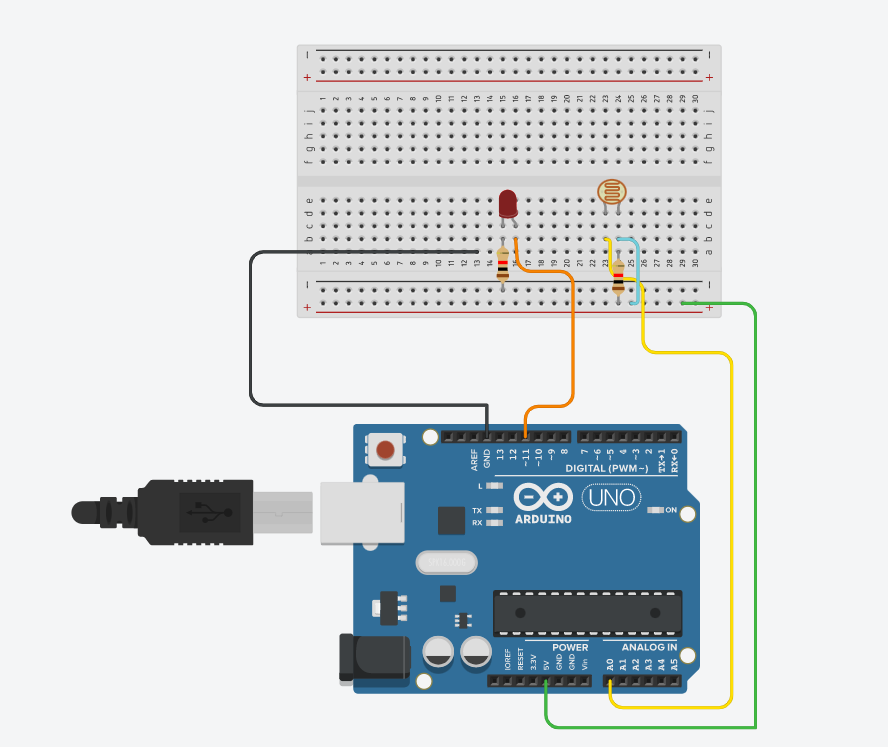
Code
int potpin=0;
int ledpin=11;
int val=0;
void setup()
{
pinMode(ledpin,OUTPUT);
Serial.begin(9600);
}
void loop()
{
val=analogRead(potpin);
Serial.println(val);
analogWrite(ledpin,val/4);
delay(10);
}
Experiment-8 Flame Sensor
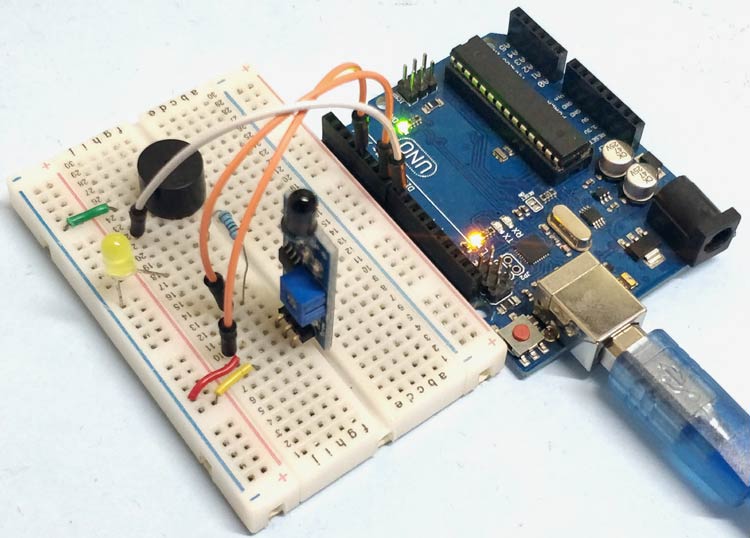
Code
int flame=0;
int Beep=9;
int val=0;
void setup()
{
pinMode(Beep,OUTPUT);
pinMode(flame,INPUT);
Serial.begin(9600);
}
void loop()
{
val=analogRead(flame);
Serial.println(val);
if(val>=600)
{
digitalWrite(Beep,HIGH);
}else
{
digitalWrite(Beep,LOW);
}
delay(500);
}
Experiment-9 LM35 Temperature Sensor
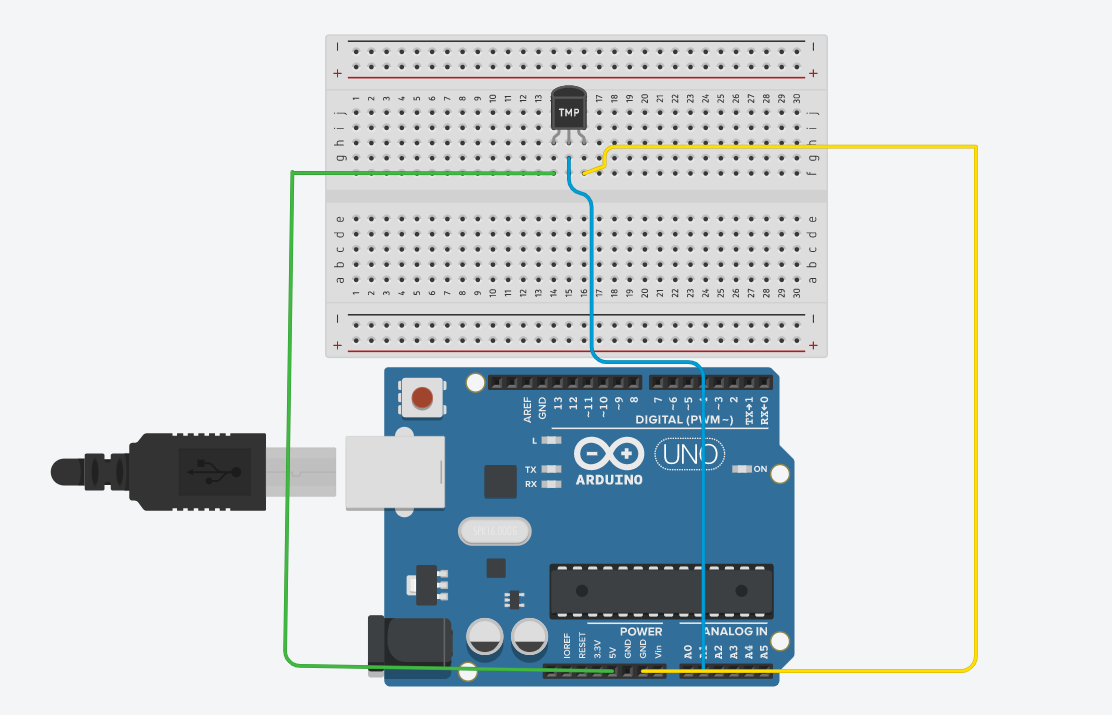
Code
int potPin = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
int val;
int dat;
val=analogRead(0);
dat=(125*val)>>8;
Serial.print("Tep");
Serial.print(dat);
Serial.println("C");
delay(500);
Experiment-10 IR Remote Control Using TSOP
Code
#include <IRremote.h>
int RECV_PIN = 11;
int LED1 = 2;
int LED2 = 3;
int LED3 = 4;
int LED4 = 5;
int LED5 = 6;
int LED6 = 7;
long on1 = 0x00FF6897;
long off1 = 0x00FF9867;
long on2 = 0x00FFB04F;
long off2 = 0x00FF30CF;
long on3 = 0x00FF18E7;
long off3 = 0x00FF7A85;
long on4 = 0x00FF10EF;
long off4 = 0x00FF38C7;
long on5 = 0x00FF5AA5;
long off5 = 0x00FF42BD;
long on6 = 0x00FF4AB5;
long off6 = 0x00FF52AD;
IRrecv irrecv(RECV_PIN);
decode_results results;
void dump(decode_results *results) {
int count = results->rawlen;
if (results->decode_type == UNKNOWN)
{
Serial.println("Could not decode message");
}
else
{
if (results->decode_type == NEC)
{
Serial.print("Decoded NEC: ");
}
else if (results->decode_type == SONY)
{
Serial.print("Decoded SONY: ");
}
else if (results->decode_type == RC5)
{
Serial.print("Decoded RC5: ");
}
else if (results->decode_type == RC6)
{
Serial.print("Decoded RC6: ");
}
Serial.print(results->value, HEX);
Serial.print(" (");
Serial.print(results->bits, DEC);
Serial.println(" bits)");
}
Serial.print("Raw (");
Serial.print(count, DEC);
Serial.print("): ");
for (int i = 0; i < count; i++)
{
if ((i % 2) == 1) {
Serial.print(results->rawbuf[i]*USECPERTICK, DEC);
}
else
{
Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC);
}
Serial.print(" ");
}
Serial.println("");
}
void setup()
{
pinMode(RECV_PIN, INPUT);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(LED6, OUTPUT);
pinMode(13, OUTPUT);
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
}
int on = 0;
unsigned long last = millis();
void loop()
{
if (irrecv.decode(&results))
{
if (millis() - last > 250)
{
on = !on;
digitalWrite(13, on ? HIGH : LOW);
dump(&results);
}
if (results.value == on1 )
digitalWrite(LED1, HIGH);
if (results.value == off1 )
digitalWrite(LED1, LOW);
if (results.value == on2 )
digitalWrite(LED2, HIGH);
if (results.value == off2 )
digitalWrite(LED2, LOW);
if (results.value == on3 )
digitalWrite(LED3, HIGH);
if (results.value == off3 )
digitalWrite(LED3, LOW);
if (results.value == on4 )
digitalWrite(LED4, HIGH);
if (results.value == off4 )
digitalWrite(LED4, LOW);
if (results.value == on5 )
digitalWrite(LED5, HIGH);
if (results.value == off5 )
digitalWrite(LED5, LOW);
if (results.value == on6 )
digitalWrite(LED6, HIGH);
if (results.value == off6 )
digitalWrite(LED6, LOW);
last = millis();
irrecv.resume();
}
}
}
Experiment-10 Potentiometer analog Value Reading
code
int potpin=0;
int ledpin=13;
int val=0;//
void setup()
{
pinMode(ledpin,OUTPUT);
Serial.begin(9600);
}
void loop()
{
digitalWrite(ledpin,HIGH);
delay(50);
digitalWrite(ledpin,LOW);
delay(50);
val=analogRead(potpin);
Serial.println(val);
}
Experiment-12 7 Segment Display
Code
int a=7;
int b=6;
int c=5;
int d=10;
int e=11;
int f=8;
int g=9;
int dp=4;
void digital_0(void)
{
unsigned char j;
digitalWrite(a,HIGH);
digitalWrite(b,HIGH);
digitalWrite(c,HIGH);
digitalWrite(d,HIGH);
digitalWrite(e,HIGH);
digitalWrite(f,HIGH);
digitalWrite(g,LOW);
digitalWrite(dp,LOW);
}
void digital_1(void)
{
unsigned char j;
digitalWrite(c,HIGH);
digitalWrite(b,HIGH);
for(j=7;j<=11;j++)
digitalWrite(j,LOW);
digitalWrite(dp,LOW);
}
void digital_2(void)
{
unsigned char j;
digitalWrite(b,HIGH);
digitalWrite(a,HIGH);
for(j=9;j<=11;j++)
digitalWrite(j,HIGH);
digitalWrite(dp,LOW);
digitalWrite(c,LOW);
digitalWrite(f,LOW);
}
void digital_3(void)
{digitalWrite(g,HIGH);
digitalWrite(a,HIGH);
digitalWrite(b,HIGH);
digitalWrite(c,HIGH);
digitalWrite(d,HIGH);
digitalWrite(dp,LOW);
digitalWrite(f,LOW);
digitalWrite(e,LOW);
}
void digital_4(void)
{digitalWrite(c,HIGH);
digitalWrite(b,HIGH);
digitalWrite(f,HIGH);
digitalWrite(g,HIGH);
digitalWrite(dp,LOW);
digitalWrite(a,LOW);
digitalWrite(e,LOW);
digitalWrite(d,LOW);
}
void digital_5(void)
{
unsigned char j;
digitalWrite(a,HIGH);
digitalWrite(b, LOW);
digitalWrite(c,HIGH);
digitalWrite(d,HIGH);
digitalWrite(e, LOW);
digitalWrite(f,HIGH);
digitalWrite(g,HIGH);
digitalWrite(dp,LOW);
}
void digital_6(void)
{
unsigned char j;
for(j=7;j<=11;j++)
digitalWrite(j,HIGH);
digitalWrite(c,HIGH);
digitalWrite(dp,LOW);
digitalWrite(b,LOW);
}
void digital_7(void)
{
unsigned char j;
for(j=5;j<=7;j++)
digitalWrite(j,HIGH);
digitalWrite(dp,LOW);
for(j=8;j<=11;j++)
digitalWrite(j,LOW);
}
void digital_8(void)
{
unsigned char j;
for(j=5;j<=11;j++)
digitalWrite(j,HIGH);
digitalWrite(dp,LOW);
}
void digital_9(void)
{
unsigned char j;
digitalWrite(a,HIGH);
digitalWrite(b,HIGH);
digitalWrite(c,HIGH);
digitalWrite(d,HIGH);
digitalWrite(e, LOW);
digitalWrite(f,HIGH);
digitalWrite(g,HIGH);
digitalWrite(dp,LOW);
}
void setup()
{
int i;// set variable
for(i=4;i<=11;i++)
pinMode(i,OUTPUT);
}
void loop()
{
while(1)
{
digital_0();
delay(1000);
digital_1();
delay(1000);
digital_2();
delay(1000);
digital_3();
delay(1000);
digital_4();
delay(1000);
digital_5();
delay(1000);
digital_6();
delay(1000);
digital_7();
delay(1000);
digital_8();
delay(1000);
digital_9();
delay(1000);
}}